編碼器使用和速度測量原理教程
1.編碼器概述
編碼器是將角位移或角速度轉換為一系列數字電脈沖的旋轉傳感器。我們可以通過編碼器測量地面位移或速度信息。根據輸出數據類型,編碼器可分為增量編碼器和絕對編碼器。根據編碼器檢測原理,它也可以分為光學、磁、電感和電容。最常見的是光電編碼器(光學)和霍爾編碼器(磁性)。
2.編碼器原理
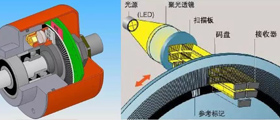
光電編碼器是通過光電轉換將輸出軸上的機械幾何位移轉換為脈沖信號或數字量的傳感器。光電編碼器由光電編碼器盤和光電探測器組成。所述光碼盤被分割成一定直徑的圓盤上的多個矩形孔。由于光電編碼器與電機同軸,檢測裝置在電機旋轉時檢測并輸出多個脈沖信號。為了判斷轉向,通常輸出兩組具有一定相位差的方波信號。
霍爾編碼器是一種傳感器,通過磁電轉換將輸出軸上的機械幾何位移轉換為脈沖或數字量。霍爾編碼器由霍爾編碼盤和霍爾元件組成。霍爾碼盤在一定直徑的圓板上均勻地分成不同的磁極。霍爾編碼盤與電機同軸。當電機旋轉時,霍爾元件檢測并輸出多個脈沖信號。通常,為了判斷轉向,輸出兩組具有一定相位差的方波信號。
可以看出,這兩種原理的編碼器的目的是獲得AB相位輸出的方波信號,使用方法是相同的。下面是一個簡單的方案。
3.編碼器接線說明
具體到我們的編碼器電機,我們可以看看實際的編碼器。
這是一個增量輸出霍爾編碼器,編碼器有AB相位輸出。因此,你不僅可以測量速度,還可以識別方向盤。按照上圖中的接線說明,我們只需要為編碼器電源提供5V電壓。當電機旋轉時,方波信號可以通過AB相位輸出。編碼器有自己的上拉電阻器,因此可以直接連接到微控制器IO進行讀取,而無需外部上拉。
4.編碼器的軟件四倍頻技術
讓我們來談談編碼器的倍頻原理。在下面,為了提高每個人的學習興趣,讓我們首先明確這是一項實用的技術。它可以將編碼器的精度提高4倍。這種效果更像是靜止相機上的光學變焦,而不是數碼變焦,數碼變焦以犧牲清晰度為代價放大圖像。下面是編碼器輸出波形圖。
這里我們使用軟件方法來實現四倍的頻率。首先,我們可以在上圖中看到編碼器輸出的AB相位波形。在正常情況下,當我們使用M方法測量速度時,我們將測量單位時間內從A相輸出的脈沖數。獲取速度信息。在傳統方法中,我們只測量A相(或B相)的上升沿或下降沿,這是上圖中相應數字1234之一,因此只能計數三次。四倍頻法包括測量A相和B相編碼器的上升沿或下降沿。這樣,它可以同時計數12次(1234的3個周期)。這就是軟件翻兩番的原理。
5.MCU如何收集編碼器數據
由于編碼器的輸出是標準方波,我們可以使用微控制器直接讀取它。軟件中有兩種處理方法:具有自身編碼器接口的微控制器,如STM32,可以直接使用硬件技術。沒有編碼器接口的MCU,如B.51 MCU,可以通過外部中斷讀取。例如,編碼器相位A輸出連接到MCU的外部中斷輸入端口,因此可以通過轉換邊緣觸發中斷。然后在函數中相應的外部中斷服務,正反轉由B相的電平決定。例如,如果當B相位較高時,A相位有一個過渡邊,則將其視為正向旋轉,低電平視為反向旋轉。
了解更多關于編碼器常識,敬請關注西安德伍拓自動化傳動系統有限公司網站,我公司為廣大新老用戶免費提供編碼器技術支持,歡迎垂詢。




 在線QQ
在線QQ 186-2947-6872
186-2947-6872 在線咨詢
在線咨詢

 info@motion-control.com.cn
info@motion-control.com.cn