淺析
磁性編碼器的結構組成和原理
磁性編碼器的最大優勢可能是其堅固性。與光學編碼器不同,磁性版本對灰塵,污垢,液體和油脂等污染物以及震動和振動不敏感。與光學編碼器類似,磁性編碼器確實需要在磁盤和傳感器之間留有氣隙。但是,磁性編碼器中的氣隙不需要像光學編碼器那樣清潔和透明。只要在磁盤和傳感器之間不存在任何含鐵材料,就會檢測到電磁脈沖。磁性編碼器正確運行的兩個重要規范是傳感器相對于磁盤(或磁帶)的徑向位置以及傳感器與磁體之間的間隙距離。
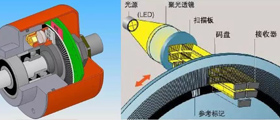
磁性編碼器的主要部分由磁阻傳感器、磁鼓和信號處理終端組成。磁鼓被記錄在相同距離的小磁極中。磁極磁化后,磁極旋轉時會產生周期性的空間漏磁場。磁傳感器探頭通過磁阻效應將變化的磁場信號轉換為電阻值的變化。在外部電勢的影響下,改變的電阻值被轉換為電壓的改變。在隨后的信號處理電路之后,模擬電壓信號被轉換成可由計算機識別的數字信號,并實現磁性編碼器的編碼功能。

磁鼓磁化的目的是磁化磁鼓上的每個小磁極,這樣當磁鼓隨電機旋轉時,磁鼓可以產生周期性的空間漏磁,該漏磁作用于磁阻以實現編碼功能。磁鼓的磁極數決定編碼器的分辨率。磁鼓磁極的均勻性和剩磁是決定編碼器結構和輸出信號質量的重要參數。下圖:磁鼓表面的磁極分布。

磁阻傳感器由磁阻傳感器組成,可分為磁阻半導體器件和強磁磁阻器件。為了提高信號采樣的靈敏度并考慮差分結構對敏感元件的溫度特性的補償效應,在磁化間隔中蝕刻具有開路/2相位差的兩條帶以形成半橋串聯網絡。如下所示:

同時,為了提高編碼器的分辨率,可以平行于磁頭安裝幾個磁阻傳感器元件。當施加電壓時,磁阻元件通過磁鼓的旋轉發射相應的正弦波。原理很容易解釋:磁鼓產生的NS磁場呈圓形運動,磁阻元件制成的傳感器的電阻隨磁場的變化而變化,檢測到Sina和SinB兩種電壓波形。磁阻傳感器的結構如圖所示。磁阻傳感器分為兩組,距離為1/4 NS。正弦電壓波形可在Mr1、Mr2、Mr3和Mr4的觸點處檢測到。同樣的原理也適用于SinB電壓波形,可以在Mr1,Mr2,Mr3和Mr4的觸點上檢測到。

信號處理電路:Sina和SinB信號到達信號處理電路后,必須將波形調整到CPU掃描范圍內。首先,必須設置AB信號的DC電壓電平,使得AB信號的直流電平位于DSP-A/D采樣電壓范圍的中心,并且幅度不超過采樣電壓范圍。通過模擬濾波器和數字濾波器對高頻和諧波進行濾波后,利用DSP的高速運算能力實時計算位置和速度;此外,另一種處理方法是在進行DSP之前,直接通過信號處理電路將Sina和SinB信號轉換為方波。后者可以更方便地進行軟件處理。
磁性旋轉編碼器的分辨率取決于磁盤周圍的磁極數和傳感器的數量。增量編碼器(無論是磁性編碼器還是光學編碼器)都使用正交輸出,并且可以使用X1,X2或X4編碼來進一步提高分辨率。增量編碼器和絕對編碼器之間的主要區別在于,無論采用何種傳感技術,絕對版本都為每個測量位置分配了唯一的二進制代碼或字。即使斷電,這也使他們能夠跟蹤編碼器的確切位置。
了解更多
編碼器相關知識,敬請關注西安德伍拓自動化傳動系統有限公司網站。公司技術團隊為您免費提供編碼器的選型、安裝、調試、保養等技術指導服務,盡量避免企業因為編碼器技術人員的短缺帶來的損失,采取“線上+線下”服務的服務形式,幫助企業解決技術難題。

 在線QQ
在線QQ 186-2947-6872
186-2947-6872 在線咨詢
在線咨詢

 info@motion-control.com.cn
info@motion-control.com.cn