編碼器系統(tǒng)怎么選擇合適?
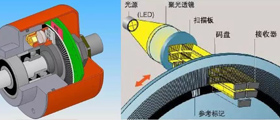
精確的運(yùn)動控制不能僅僅依賴于編碼器的精度,同樣重要的是系統(tǒng)的動態(tài)響應(yīng)。精確的位置測量當(dāng)然很重要,但如果無法精確定位,該系統(tǒng)也毫無用處。直接驅(qū)動電機(jī)(也稱為轉(zhuǎn)矩電機(jī))產(chǎn)生高轉(zhuǎn)矩,并在非常小的角度下實現(xiàn)精確的伺服控制。它的動態(tài)響應(yīng)非常好,因為負(fù)載直接連接到驅(qū)動軸,消除了可能導(dǎo)致齒隙、磁滯、齒輪故障或皮帶變形的傳動部件。大內(nèi)徑扭矩電機(jī)的無機(jī)框架結(jié)構(gòu)不能提供明顯和有用的連接。可以安裝帶軸輸出的旋轉(zhuǎn)編碼器,但環(huán)形編碼器可以提供簡單的解決方案。
怎么選擇合適?")
此外,環(huán)形編碼器與負(fù)載一樣,直接連接到驅(qū)動軸,從而避免了系統(tǒng)中不必要的“間隙”。在任何測量或控制系統(tǒng)中,都希望編碼器盡可能靠近驅(qū)動部件,這有助于減少潛在的諧振并影響伺服性能,尤其是當(dāng)伺服帶寬增加時。在確定精度要求時,應(yīng)分別分析精度、分辨率和重復(fù)性:
對于需要重復(fù)性的應(yīng)用,如機(jī)械臂,系統(tǒng)在相同編碼器計數(shù)器位置重復(fù)停止的能力比工作臺的角度精度更重要。
對于連續(xù)的平穩(wěn)運(yùn)動,所選的分辨率和精度不應(yīng)允許在控制伺服帶內(nèi)出現(xiàn)“抖動”。
對于天文望遠(yuǎn)鏡等慢速移動設(shè)備來說,角度測量的準(zhǔn)確性比系統(tǒng)的最高數(shù)據(jù)速率更重要。
對于直升機(jī)攝像頭座,精確的手動定位和分辨率比可重復(fù)性或絕對精度更重要,盡管當(dāng)使用相同的傳感器為武器系統(tǒng)提供目標(biāo)數(shù)據(jù)時,后者變得更重要。
對于高速系統(tǒng),可能需要在速度和位置精度之間取得平衡。粗針跡系統(tǒng)(較少的線)適用于高數(shù)據(jù)率,但細(xì)針跡系統(tǒng)通常具有較低的細(xì)分誤差。
了解更多
電機(jī)編碼器相關(guān)知識,敬請關(guān)注西安德伍拓自動化傳動系統(tǒng)有限公司網(wǎng)站。公司技術(shù)團(tuán)隊為您免費(fèi)提供編碼器的選型、安裝、調(diào)試、保養(yǎng)等技術(shù)指導(dǎo)服務(wù),盡量避免企業(yè)因為編碼器技術(shù)人員的短缺帶來的損失,采取拉線上+拉線下服務(wù)的服務(wù)形式,幫助企業(yè)解決技術(shù)難題。








有限公司")
 在線QQ
在線QQ 186-2947-6872
186-2947-6872 在線咨詢
在線咨詢

 info@motion-control.com.cn
info@motion-control.com.cn