增量編碼器的測速實現原理與接口。
與絕對編碼器相比,增量編碼器只是表明相對的軸或滑塊的運動,然后只有當相關的電子系統是動力。必須使用其他手段來確定絕對位置;編碼器制造商可能提供額外的輸出,例如額外的數據位,表明何時通過了"索引"標記,或者系統設計者可能包括外部開關,以表明允許旅行的結束。在某些應用程序中,例如軸編碼器用于控制儀器的操作,缺乏對絕對位置的了解在任何情況下都可能無關緊要。

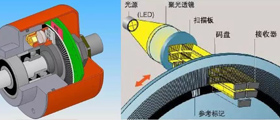
在典型的增量編碼器中,兩個的探測器利用光學或其他技術提供數字信號X和Y從十字架上。這兩個信號通過在軸旋轉或滑塊距離的規則間隔內調整軸或滑塊的邏輯狀態來指示軸或滑塊的運動。但是,信號的邏輯狀態改變了X相對于那些在信號中Y角形.所產生的基本振蕩信號的相位恒速動作,兩個在,即它們之間有一個90度的相位差。該系統運行的關鍵是當滑塊或軸的運動方向改變時,X和Y由于機械逆轉,自動逆轉.這種相位逆轉可以用邏輯電路來解釋
計數器是這樣的,對一個輸入應用上升的邊緣會導致輸出整數向下計數,而對另一個輸入應用的脈沖會導致它計數。計數脈沖由連接到X和Y,以及J-K快閃"操縱"這些脈沖到一個或另一個計數器輸入,取決于運動方向。這詳細顯示在波形圖X和Y。請注意,在此電路中,或閘門必須具有傳播延遲比數據設置時間更長的觸發器,這也是最短的時間。波形比此傳播延遲要長.因此,有一個最大允許的機械速度,可以由該電路跟蹤無錯誤。幸運的是,大多數邏輯門操作速度很快,通常不會有嚴重的限制。
兩個信號,X而Y,需要在這種編碼器,以便能夠檢測的方向的運動。在某些應用中,不需要感知運動方向。例如,當記錄旋轉機器中軸承的總磨損時,運動方向是不相關的,而運動方向可能已經在洗衣機汽車或車內汽車電子點火系統.在這種情況下,可以使用一個輸出器,輸入一個更簡單的后續電路,例如指示"總運動"的計數器;這種裝置通常被稱為"塔喬發電機"或"轉速表"。
顯示電路中圖中,每隔一段時間,每隔一段時間,一個計數脈沖便會被輸入計數器。X或Y波形,取決于運動方向。實際上,在每個周期中有四個邏輯轉換,每個周期有兩個邏輯轉換。X和Y為了從編碼器中獲得最大的分辨率,通過檢測和計算每一個邏輯轉換,需要一個更復雜的電路。一個電路設計來以這種方式解釋編碼器輸出時的所有邏輯轉換。在這個電路里,Rc網絡,以及施密特倒轉器,用以引入清楚界定的信號延遲令=RC=100~2nf=200ns=0.2大象,而相關的Xnor門產生的邏輯性高尖峰持續這一時期。這個電路運行的全部細節是作為練習留下的.該電路可與一個典型的1米長的商用線性編碼器一起使用,并在每個邏輯轉換之間提供一個完整的20um的編碼器周期和一個可能的數。X105取決于零啟動位置。為了解決這個問題,需要將二進制計數器芯片擴展到20位。一個典型的計算機接口卡也會為計數器的零化提供便利。以及轉換對應于正向運動的計數方向。在讀取計數器的瞬間,也可能與其他類似的卡片同步。這對一個多軸系統來說可能是很重要的,因為它需要了解:X,Y)驅動元件在計算機指定的某一瞬間的位置。
了解更多
增量式編碼器相關知識,敬請關注西安德伍拓自動化傳動系統有限公司網站。公司技術團隊為您免費提供編碼器的選型、安裝、調試、保養等技術指導服務,盡量避免企業因為編碼器技術人員的短缺帶來的損失,采取拉線上+拉線下服務的服務形式,幫助企業解決技術難題。

 在線QQ
在線QQ 186-2947-6872
186-2947-6872 在線咨詢
在線咨詢

 info@motion-control.com.cn
info@motion-control.com.cn