電機(jī)反饋編碼器的原理與應(yīng)用?
編碼器是一種安裝在電機(jī)軸上并使用數(shù)字脈沖來跟蹤電機(jī)位置的機(jī)電設(shè)備。通過計(jì)算編碼器產(chǎn)生的脈沖數(shù),可以通過簡(jiǎn)單的計(jì)算確定距最后已知位置的距離,從而驗(yàn)證電機(jī)是否處于目標(biāo)位置。
反饋編碼器的原理與應(yīng)用?")
編碼器的工作原理
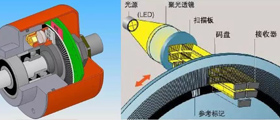
編碼器內(nèi)部有一個(gè)光發(fā)射器、一個(gè)邊緣有切縫的圓盤和一個(gè)光接收器。當(dāng)編碼器盤隨電機(jī)軸旋轉(zhuǎn)時(shí),編碼器盤上的狹縫將一側(cè)的靜態(tài)光源變成另一側(cè)的閃光。另一側(cè)的光接收器檢測(cè)這些光脈沖,并以數(shù)字方式輸出方波脈沖信號(hào)到主機(jī)控制器。如果編碼器和電機(jī)之間的分辨率相同,則每一步都會(huì)生成一個(gè)脈沖。
增量系統(tǒng)
在增量系統(tǒng)中,增量編碼器是典型的反饋設(shè)備。增量編碼器有 2 或 3 通道(A/B 或 A/B/Z)輸出。每個(gè)通道相當(dāng)于編碼器盤外緣上的切割狹縫的物理軌道(典型編碼器的每個(gè) A/B 通道 200 個(gè)狹縫)。通道 A 和 B 的狹縫偏移或異相 90°,以便辨別運(yùn)動(dòng)方向。第三個(gè) Z 通道只是單個(gè)軌道上的一個(gè)狹縫,可以標(biāo)記起始位置或計(jì)算轉(zhuǎn)數(shù)。稍后有一張圖片可以幫助解釋這一點(diǎn)。
由于光學(xué)編碼器依靠電力來產(chǎn)生光脈沖,因此如果需要絕對(duì)位置跟蹤,增量系統(tǒng)并不是最理想的。在這種情況下,絕對(duì)式反饋系統(tǒng)是必要的。
絕對(duì)系統(tǒng)
在絕對(duì)系統(tǒng)中,添加電池以保持電源開啟,以避免在因任何原因需要循環(huán)電源時(shí)丟失位置信息。當(dāng)系統(tǒng)通電時(shí),電源為電池充電,并為電機(jī)、驅(qū)動(dòng)器和編碼器供電,從而保留位置信息。當(dāng)電源切斷時(shí),驅(qū)動(dòng)器和編碼器將使用電池作為電源,直至電量耗盡。到那時(shí),你最終會(huì)遇到與增量系統(tǒng)相同的問題。
在絕對(duì)系統(tǒng)中,絕對(duì)式編碼器是典型的反饋設(shè)備。絕對(duì)式編碼器的工作原理與增量式編碼器相同,但設(shè)計(jì)較為復(fù)雜,成本較高。
了解更多
編碼器相關(guān)知識(shí),敬請(qǐng)關(guān)注西安德伍拓自動(dòng)化傳動(dòng)系統(tǒng)有限公司網(wǎng)站。公司技術(shù)團(tuán)隊(duì)為您免費(fèi)提供編碼器的選型、安裝、調(diào)試、保養(yǎng)等技術(shù)指導(dǎo)服務(wù),盡量避免企業(yè)因?yàn)榫幋a器技術(shù)人員的短缺帶來的損失,采取拉線上+拉線下服務(wù)的服務(wù)形式,幫助企業(yè)解決技術(shù)難題。









化傳動(dòng)系統(tǒng)有限公司")
 在線QQ
在線QQ 186-2947-6872
186-2947-6872 在線咨詢
在線咨詢

 info@motion-control.com.cn
info@motion-control.com.cn