PLC如何借助
編碼器實現高效定位控制?
嚴格來說,編碼器的主要功能是提供位置或速度信息,從而指導如何進行定位。而實際執行定位操作,則依賴于PLC等控制器或步進電機等執行機構。編碼器在工業應用中,就像人的眼睛一樣,能夠感知電機軸或負載當前所處的位置。通常,工業上采用的是光電式編碼器,它們通過光電轉換原理,將機械運動轉化為電信號輸出,從而實現對位置的精確測量。下面,我們將對編碼器及其在工業中的應用進行簡要說明。

圖為光電編碼器的工作原理及輸出波形
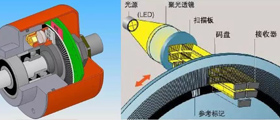
光電編碼器的原理相對直觀。其核心部件是一個輕薄的圓盤,上面通過精密儀器腐蝕雕刻出許多細小的縫隙。這個圓盤將360度的圓周細分成多個等分,例如分成1024組,每組之間的角度差為0.3515625度。

圖為光電編碼器的碼盤實物照片
圓盤的一側安裝了一個精密的發光源,而另一側則配置了接收器,該接收器包含光敏電阻等元件,并配有放大和整形電路。當圓盤旋轉時,縫隙處允許光線通過,使得接收器能夠瞬間接收到光脈沖。
這些光脈沖經過電路處理后,會轉化為電脈沖信號輸出。因此,當圓盤旋轉一周時,會對應輸出1024個脈沖信號。若設定第一個脈沖位置為0度,那么第二個脈沖位置就對應于0.3515625度,第三個脈沖位置則是0.3515625度的兩倍,以此類推。
通過讀取這些脈沖信號的個數,我們可以精確地確定圓盤(即編碼器)的當前位置。如果將編碼器安裝在電機的軸上,并確保電機軸與圓盤之間是剛性連接,那么電機軸的位置與圓盤的位置將一一對應。因此,通過讀取編碼器的脈沖信號,我們就可以準確地知道電機的軸位置。這種光電編碼器的應用,使得位置測量變得既精確又可靠。

圖為光電編碼器的工作原理及電路輸出圖
電機軸通常通過同步帶、齒輪、鏈條等傳動裝置,驅動負載如絲桿進行運動。這種驅動關系形成了一個所謂的電子齒輪比,它描述了電機轉動一圈時,絲桿會相應前進的毫米數。編碼器則負責實時測量電機的轉動情況,并將其轉化為脈沖信號輸出。PLC或其他控制器通過讀取這些脈沖信號,就能反推出當前絲桿的具體位置。這樣,編碼器與電機、絲桿之間的協同工作,實現了對負載位置的精確控制。

圖為編碼器順時針或逆時針旋轉的波形圖
然而,由于編碼器是圓形的,如果它持續無限制地旋轉,角度將會不斷累積變得無窮大。為了解決這一問題,設計了增量型編碼器。這種編碼器在旋轉一圈時,會輸出三組信號——A、B和Z。其中,A和B兩組信號是相同的脈沖,它們共同代表了一圈內的圓周角度。而且,這兩種脈沖信號是處于正交狀態的,這意味著它們之間存在一個固定的相位差。
當編碼器旋轉時,通過監測A相和B相脈沖的上升沿和下降沿的先后順序,我們可以準確地判斷出編碼器當前的旋轉方向是順時針還是逆時針。例如,如果一圈內有1024個脈沖,那么每個脈沖都對應著圓周上的一個固定角度。通過計數這些脈沖,并結合A、B相脈沖的相位關系,我們就可以精確地知道編碼器當前所處的位置和旋轉方向。這種設計使得增量型編碼器在需要連續旋轉和精確位置控制的場景中非常有用。

圖為判斷編碼器旋轉方向的原理圖
另外,增量型編碼器還設計有一個Z相脈沖。盡管編碼器可以持續旋轉,角度看似無窮無盡,但實際上這些角度是周而復始、循環重復的。Z相脈沖被固定在圓周上的特定位置,每當編碼器完成一整圈旋轉時,它只會輸出一個Z相脈沖。
如果將Z相脈沖作為基準點,那么每當系統讀取到這個脈沖時,就可以進行清零操作。這樣做的好處是,可以將角度的最大值限制在360°以內,從而避免角度的無限累積。簡而言之,Z相脈沖就像一個零基準點,幫助我們在連續旋轉中保持對角度的精確控制。

圖為編碼器正轉輸出的波形圖

圖為編碼器反轉輸出的波形圖
這樣設計的好處在于,即使系統意外斷電并重新上電,只要能重新找到編碼器的基準點,我們就可以迅速確定絲桿的初始位置。這為我們提供了在復雜工業環境中穩定、可靠的位置控制解決方案。

圖為伺服系統的控制原理圖
上述的定位方式被稱為增量坐標系,而實現這種定位的編碼器即為增量型編碼器。由于其靈活性和相對低廉的價格,增量型編碼器在工業應用中廣泛使用。然而,在某些特定場景下,設備僅需在360°范圍內旋轉。對于這類需求,編碼器可以設計得更為精密,例如采用13位細分,這意味著一圈內將產生2的13次方個脈沖,每個脈沖精確對應一個角度值。這種設計使得脈沖數與角度一一對應,即便系統斷電,也無需重新調整零位,因此被稱為單圈絕對值編碼器。
對于需要旋轉多圈的負載,例如最大旋轉5圈,即總共1800°的情況,編碼器同樣能夠精確對應每個脈沖與這1800°中的某一角度。這種多圈絕對值編碼器在高檔數控機床等應用中較為常見,它能夠提供絲桿或其他旋轉部件的當前精確位置,且不受系統斷電歸零的影響。

圖為絕對式編碼器的內部齒輪結構圖
此外,編碼器還存在磁電式的設計,這種編碼器在碼盤上布置了多個南北極交替的小磁鐵。通過霍爾效應傳感器讀取這些小磁鐵的信號,進而轉化為輸出信號。這些信號同樣經過放大和整形后變成電脈沖。在工作原理上,磁電式編碼器與光電編碼器有相似之處,但價格更為親民,且具有較高的可靠性。然而,在精度方面,磁電式編碼器相較于光電編碼器稍遜一籌。
PLC如何通過編碼器判斷位置
首先我們要理解PLC能夠接收開關量輸入,即高低電平的信號。編碼器的脈沖信號可以被視為在極短時間內快速變化的一組開關量。然而,由于這種開關量的變化頻率極高,PLC的普通I/O端口無法準確捕捉所有脈沖的個數。這是因為PLC在工作過程中存在掃描周期,它需要定期刷新普通I/O端口的數據。而編碼器的精度極高,單位時間內輸出的脈沖數量過多,因此普通I/O端口無法勝任這一任務。
為了解決這個問題,通常需要使用PLC的特殊功能模塊或高速計數器模塊來讀取編碼器的脈沖信號。這些模塊具有更高的采樣率和計數能力,能夠準確記錄編碼器的脈沖數,從而實現對位置的精確判斷。通過這種方法,PLC可以有效地利用編碼器的信號,實現精準的定位控制。

圖為PLC接收到的編碼器數據反饋圖
通常情況下,PLC會配備專門的高速計數端口,這些端口利用底層單片機的硬件邏輯來高效完成編碼器的計數任務。這樣做的好處是能夠有效避免掃描周期對計數精度的影響。在PLC中,通常會設計有專門的高速計數指令,用戶在使用時只需直接調用這些指令,就能方便地讀取當前的脈沖值,從而實現對編碼器輸出信號的精確處理和控制。

圖為PLC讀取編碼器輸出信號的原理圖
在脈沖的計算和輸出過程中,由于掃描周期的存在,不可避免地會產生一定的滯后影響。特別是在控制一些執行機構,如氣缸進行裁切動作時,這種滯后可能導致動作的不準確或延遲。因此,在實際應用中,我們需要考慮并補償這種提前量的問題,以確保執行機構能夠按照預期進行精確的動作。

圖為工作臺控制系統構成圖
需要提醒的是,當使用PLC來控制伺服系統或步進系統時,通常并不需要依賴編碼器的反饋來確定位置。相反,PLC可以通過發出位置脈沖給伺服驅動器,利用驅動器內部的位置環來實現位置控制。在這種情境下,PLC主要扮演指令發出的角色,并不直接參與位置閉環的構建。然而,如果使用的是專門的定位模塊控制,如NC等控制方式,那么在這些模塊內部是可以構建位置閉環的,以實現更精確和可靠的位置控制。
了解更多
電機編碼器相關知識,敬請關注西安德伍拓自動化傳動系統有限公司網站。公司技術團隊為您免費提供編碼器的選型、安裝、調試、保養等技術指導服務,盡量避免企業因為編碼器技術人員的短缺帶來的損失,采取拉線上+拉線下服務的服務形式,幫助企業解決技術難題。

 在線QQ
在線QQ 186-2947-6872
186-2947-6872 在線咨詢
在線咨詢

 info@motion-control.com.cn
info@motion-control.com.cn