編碼器是如何實現定位功能的?
編碼器,作為工業控制中的關鍵部件,主要負責測量和報告電機軸或負載的當前位置。然而,
旋轉編碼器本身并不直接執行定位操作,而是需要配合數控系統(如PLC等控制器)以及伺服或步進電機來實現精確定位。編碼器可以比作人的眼睛,它知道電機軸或負載當前所處的位置。

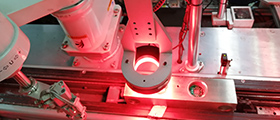
圖為與測量輪配合測速使用的亨士樂增量編碼器照片
編碼器的工作原理
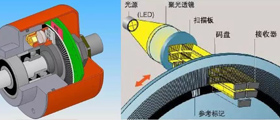
以光電編碼器為例,它通常包含一個薄而輕的圓盤(碼盤),該圓盤上通過精密儀器刻有許多細小的縫隙。這些縫隙將360度圓周細分為多個等份,比如1024組,這樣每組之間的角度差就是360/1024度=0.3515625度。
在碼盤的一面安裝有一個精密的發光源,而在另一面則配置有接收器,如光敏電阻等元件,并配有放大和整形電路。當碼盤轉動時,有縫隙的地方會讓光線通過,此時接收器會瞬間接收到光脈沖。這些光脈沖經過電路處理后,轉化為電脈沖信號輸出。這樣,當碼盤旋轉一周時,會對應輸出1024個脈沖。通過讀取這些脈沖的個數,就可以確定碼盤(進而電機軸)當前所處的位置。
編碼器的應用
電機軸位置檢測:將編碼器安裝在電機軸上,由于電機軸與碼盤是剛性連接的,因此兩者位置一一對應。通過讀取編碼器輸出的脈沖數,就可以知道電機軸的當前位置。
負載位置檢測:電機軸通常會通過同步帶、齒輪、鏈條等帶動負載(如絲桿)運動。根據特定的電子齒輪比關系(即電機轉一圈,絲桿前進的毫米數),通過讀取編碼器輸出的脈沖數,可以反推出當前絲桿的位置。
增量型編碼器與絕對值編碼器
增量型編碼器:為了解決編碼器無限旋轉導致角度無窮大的問題,設計了增量型編碼器。它會在每轉一圈時輸出三組信號ABZ。其中,AB相脈沖對應一圈內的圓周角度,且兩種脈沖處于正交狀態。通過判斷AB相脈沖的上升沿和下降沿的先后順序,可以確定編碼器的旋轉方向。Z相脈沖作為基準點,編碼器每轉一圈只輸出一個Z相脈沖。這樣,即使系統斷電重新上電,只要能找到這個基準點,就可以確定絲桿的初始位置。
絕對值編碼器:對于只需要轉一圈或幾圈的應用場景,可以使用絕對值編碼器。絕對值編碼器具有更高的細分精度,如13位編碼器可以輸出2^13個脈沖來對應360度。這種編碼器在斷電后無需重新調整零位,因為脈沖數與角度之間存在一一對應的關系。對于需要轉多圈但圈數不多的應用,絕對值編碼器同樣適用。
磁電編碼器
除了光電編碼器外,還有磁電編碼器。它通過在碼盤上加工多個南北間隔的小磁鐵,并使用霍爾元件讀取小磁鐵信號來輸出電脈沖信號。磁電編碼器價格較為便宜且可靠性高,但精度稍遜于光電編碼器。
了解更多
編碼器相關知識,敬請關注西安德伍拓自動化傳動系統有限公司網站。公司技術團隊為您免費提供編碼器的選型、安裝、調試、保養等技術指導服務,盡量避免企業因為編碼器技術人員的短缺帶來的損失,采取拉線上+拉線下服務的服務形式,幫助企業解決技術難題。

 在線QQ
在線QQ 186-2947-6872
186-2947-6872 在線咨詢
在線咨詢

 info@motion-control.com.cn
info@motion-control.com.cn