伺服電機(jī)有必要加裝
編碼器做反饋嗎?
在設(shè)備設(shè)計(jì)中,當(dāng)選擇伺服電機(jī)作為動(dòng)力源來(lái)驅(qū)動(dòng)設(shè)備旋轉(zhuǎn)時(shí),是否還需要額外添加編碼器來(lái)反饋設(shè)備的運(yùn)行距離,以及PLC如何獲取這些數(shù)據(jù)?
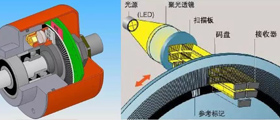
置海德漢編碼器的伺服電機(jī)內(nèi)部結(jié)構(gòu)照片")
圖為內(nèi)置海德漢編碼器的伺服電機(jī)內(nèi)部結(jié)構(gòu)照片
伺服電機(jī)自帶的編碼器功能
內(nèi)置編碼器的作用:伺服電機(jī)通常內(nèi)置有編碼器,用于實(shí)時(shí)測(cè)量電機(jī)的轉(zhuǎn)角和轉(zhuǎn)速。通過(guò)編碼器反饋的數(shù)據(jù),可以精確控制伺服電機(jī)的運(yùn)動(dòng)。
電子齒輪比的應(yīng)用:用戶可以通過(guò)設(shè)置伺服控制器的電子齒輪比,將PLC發(fā)出的脈沖信號(hào)與電機(jī)的實(shí)際運(yùn)動(dòng)距離進(jìn)行換算,從而實(shí)現(xiàn)對(duì)伺服電機(jī)運(yùn)行距離的控制。這種方法依賴于伺服電機(jī)自帶的編碼器。
PLC讀取伺服驅(qū)動(dòng)器數(shù)據(jù)的方式
差分信號(hào)的接收:伺服驅(qū)動(dòng)器通常反饋差分信號(hào),這種信號(hào)需要專門(mén)的PLC或模塊才能接收。例如,臺(tái)達(dá)的DVP32EH00M2等型號(hào)PLC就支持差分信號(hào)的接收。
通訊方式讀取:如果對(duì)回饋速度響應(yīng)的要求不高,也可以通過(guò)通訊協(xié)議(如Modbus、EtherCAT等)從伺服驅(qū)動(dòng)器讀取數(shù)據(jù)。這種方式不需要額外的硬件支持,但可能受到通訊速率的限制。
全閉環(huán)控制的需求
半閉環(huán)與全閉環(huán)的區(qū)別:伺服電機(jī)在大多數(shù)情況下采用半閉環(huán)控制,即僅通過(guò)電機(jī)自帶的編碼器進(jìn)行反饋。但在要求極高精度的場(chǎng)合,需要實(shí)現(xiàn)全閉環(huán)控制,以確保電機(jī)運(yùn)轉(zhuǎn)距離與機(jī)械位置完全一致。
額外編碼器的必要性:為了實(shí)現(xiàn)全閉環(huán)控制,通常需要在機(jī)械末端或關(guān)鍵位置額外安裝一個(gè)編碼器(如光柵尺),用于直接測(cè)量機(jī)械位置。這樣,PLC就可以同時(shí)接收電機(jī)編碼器和額外編碼器的數(shù)據(jù),進(jìn)行更精確的控制和反饋。
綜上所述,是否需要單獨(dú)加編碼器來(lái)反饋設(shè)備旋轉(zhuǎn)的運(yùn)行距離,取決于具體的應(yīng)用場(chǎng)景和控制需求。在大多數(shù)情況下,伺服電機(jī)自帶的編碼器已經(jīng)足夠滿足控制要求;但在需要極高精度的場(chǎng)合,則需要實(shí)現(xiàn)全閉環(huán)控制,并額外添加編碼器來(lái)確保控制精度。同時(shí),PLC讀取伺服驅(qū)動(dòng)器數(shù)據(jù)的方式也有多種選擇,包括使用專用PLC或模塊接收差分信號(hào),以及通過(guò)通訊協(xié)議讀取數(shù)據(jù)。
了解更多
伺服電機(jī)編碼器相關(guān)知識(shí),敬請(qǐng)關(guān)注西安德伍拓自動(dòng)化傳動(dòng)系統(tǒng)有限公司網(wǎng)站。公司技術(shù)團(tuán)隊(duì)為您免費(fèi)提供編碼器的選型、安裝、調(diào)試、保養(yǎng)等技術(shù)指導(dǎo)服務(wù),盡量避免企業(yè)因?yàn)榫幋a器技術(shù)人員的短缺帶來(lái)的損失,采取拉線上+拉線下服務(wù)的服務(wù)形式,幫助企業(yè)解決技術(shù)難題。











化傳動(dòng)系統(tǒng)有限公司")
 在線QQ
在線QQ 186-2947-6872
186-2947-6872 在線咨詢
在線咨詢

 info@motion-control.com.cn
info@motion-control.com.cn